

无人机的飞行计划
零度智控依托大数据云端建模

云端建模/图 来源网络
零度智控SMART智能无人机整体解决方案,先通过特殊的无人机对室内环境进行建模数据采集,在云端进行运算和处理,运用Azure云端服务将无人机上传数据进行运算处理后,可进行存储或者返回用户预设终端设备,弥补无人机机载运算能力不足的问题,此后所有无人机只要飞行时调取相应的数据或者路点文件就可以实现避障。无人机只须具备基本的避障功能来处理室内环境变化对无人机飞行的影响,事先调取云端文件做到"芯中有数",能给无人机机载端的运算"减负"不少。
MIT实时飞行计划技术
MIT研发出的新技术可以让无人机像蜂鸟一样灵活,可以轻松地躲开树木或者建筑物。它使用机载传感器和测量设备寻找出可以飞行的自由空间做出“实时飞行计划”,而不是识别障碍物后再进行躲避,这种技术让无人机变得更聪明、更自主。障碍感知技术和实时规划路线的能力需要传感系统,人工智能,计算机算法和工程学结合。MIT这一成果让人工智能无人机的技术迈进了一大步,让无人机变得更加实用。
人工智能无人机/图 来源网络
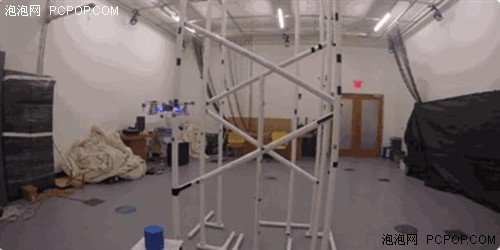
MIT的计算机和人工智能实验室(Computer Science and Artificial Intelligence Labs)发布了一段在复杂的模拟环境下利用该系统让无人机穿过障碍的视频,其精准和流畅表现让人赞叹。在视频中,长3.5英寸重1盎司(28.34g)的无人机在10平方英尺的空间内以每秒1米的速度飞行。
MIT的模拟环境中有通过绳子和PVC管搭建的26种不同类型障碍物,无人机可以在“模拟森林”中转圈或者以8字型轨迹飞行。
MIT的研究生Benoit Landry说:“这种软件为小型无人机创建了一个更积极的飞行方式,使其可以在狭窄凌乱的空间更好的飞行。”
CSAIL的这种不考虑障碍物,而寻找可飞行的路线,确实是一种新颖的尝试,INTEL基于VICON运动捕获,Intel在CES展会订制版无人机的演示,现场搭建起一个模拟树林和道路的场景,当自行车运动员穿梭其中时,无人机自动追拍,并灵活的躲避树丛。
当突然天降障碍物时,无人机能够马上停住,防止撞击,这套系统需要依靠VICON相机才能运行,改造过后的无人机之所以能如此流畅的自动跟踪拍摄和避障,除了机身上带有的realsense传感器以外,价值百万的VICON系统的定位信息进入场内主飞控中参与无人机控制才能使无人机如此逆天避障。

动态捕捉技术/图 来源网络
现场飞行的无人机上有很多灰白色小球,和这名演员身上的灰白色小球一样,用于Motion Capture动态扑捉技术,英国Oxford Metrics Limited公司推出的VICON光学运动捕捉系统是当前最为流行的动画制作辅助系统。
市面上的普通版无人机可以依靠机上自带的超声波和摄像头只能简单实现避开大的障碍物。
关注我们



{kind=link}
{kind=link}
{kind=link}
{kind=link}