

美女聊车:十分钟搞明白无人驾驶如何

《十分钟搞明白无人驾驶,爽不爽?》

这几天,美国小伙子乔治.霍兹的英勇事迹又开始在微信朋友圈里流传。玩手机的同学们应该对这个名字不陌生,2007年,他破解了iPhone,2011年他又破解了索尼的PS3,然后又和索尼打了一场大官司,搞的全世界的黑客组团来支援他。那一年他才21岁。

大学毕业后,霍兹遇到了埃隆.马斯克,就是特斯拉和太空探索公司的老板。马斯克一看,诶,这小伙挺有才啊,于是就想签下他去特斯拉干活。但最后俩人没谈成这个合同,霍兹还留了句话,要碾压特斯拉。
然后,就是2015年年底,霍兹带着记者试驾了他用讴歌改装的一辆无人驾驶汽车。硅谷的投资人看到这么一个从天而降的宝贝,当然不会放过他。今年3月,霍兹的公司成立,马上就拿到了310万美元的投资,然后被打上了2000万美元的估值标签。
又一个硅谷英雄出现了。
这个故事又让你们想起来当年的比尔盖茨和乔布斯了吧,但是要想一个人单枪匹马的搞出一辆无人驾驶汽车,这难度估计比当年关羽过五关斩六将还得高一点。因为它涉及的技术,实在是跨越了太多的领域。
无人驾驶,或者说智能汽车,不是说往中控里装个MIUI或者阿里云就智能了,要不然谷歌也不会搞了这么多年还在做实验。要想实现汽车的智能控制,开发的人首先要搞定的,就是汽车里面的网络。

一般来说,现在一辆汽车里,有三个局域网同时运行。想想平时咱们单位里,一个局域网就让网管小哥忙的四脚朝天了,汽车里这三个局域网是同时运行,还得相互联系。
汽车里面最底层,也是最重要的一个局域网,叫CAN总线,这是现在汽车里面辈分最大的局域网了。跑到改车店刷过发动机ECU的同学应该都接触过这条隐藏在车身最里面的系统吧。CAN总线连接的,是整个汽车里面最核心的部分,比如发动机、变速箱、转向刹车这些地方的控制电脑,就是通过CAN总线互相传递信息。

CAN总线的辈分最大,是因为它在1983年就开始设计。当时的汽车里面,已经开始有了传感器和控制电脑,这些东西之间很需要一种通讯方式让他们搭上话。于是德国的博世集团找来了奔驰、英特尔,还有德国几个大学,一起设计了CAN总线的软硬件。这条总线的运转很高效,每一条指令只有8个字节,每一个节点之间的延迟只有0.26毫秒。后来在1993年的时候,CAN总线成为了国际标准,它的应用也就越来越广泛,并且开始串联起更多的汽车零部件。
就像现在我们带着遥控钥匙走到车门边拉开车门这一个简单的动作,汽车里的就已经有4个控制单元通过CAN总线互相联系,做好了开车前的准备。
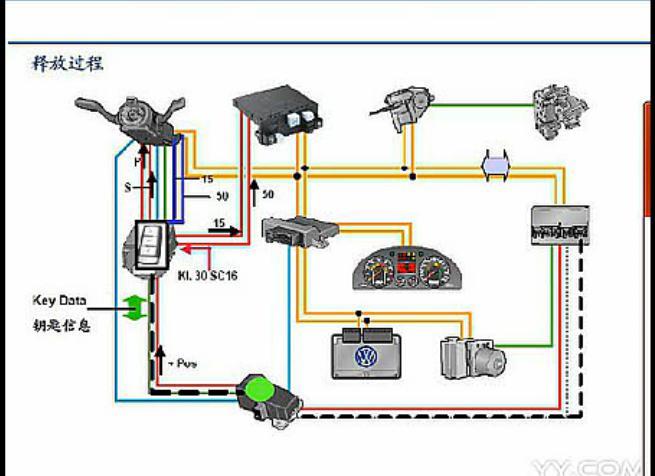
但是CAN总线毕竟还是要干更重要的事情,所以就有了一个辅助的LIN总线来连接一些不太重要的部分,比如升降车窗玻璃,调整座椅角度这些。
再后来,像摄像头、液晶屏这些东西也开始装到车里的时候,CAN总线就不够用了。就像现在的ACC自适应巡航、全景倒车影像这些功能,它们之间通讯的数据量,每秒有50到65兆,而且这些设备在汽车上是越来越多,带宽需求超过1G是早晚的事。CAN总线的带宽呢?嘿嘿,1M……所以,以太网就被装到了汽车里。
这就是现在汽车里最常用的三个局域网,CAN总线负责发动机、车辆控制这些最核心的部分,LIN总线协助CAN总线干一些零碎活,以太网专门连接摄像头、大屏幕,还有各种对外的互联网,这三个局域网之间,用网关再连接起来。
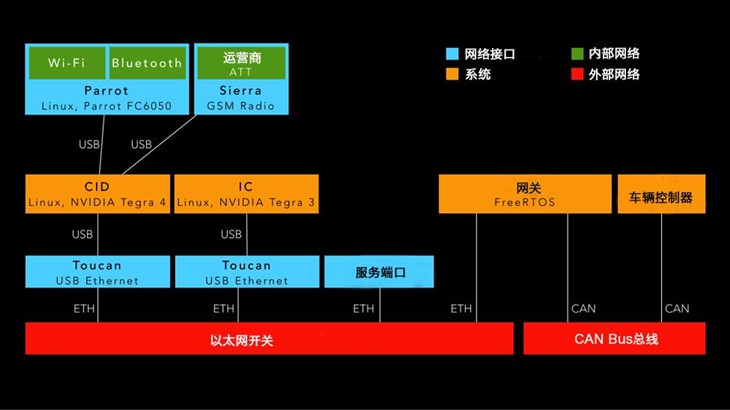
像特斯拉这种车,它里面的网络结构,就是这三个局域网互相配合。所以说,要想造出一辆无人驾驶的汽车,首先你得在一辆汽车里合理的布置好这三种局域网。
对于不是汽车行业的人来说,最不容易搞定的,就是看起来很古老的CAN总线。虽然这个总线技术是公开的,但是在总线里传输的数据,是各个汽车厂商积累了很多年的经验得出来的。像发动机各个单元的控制参数,像底盘悬架的调教数据,这都是一个汽车厂商的看家本领,绝对不会轻易外传。
看起来技术很强悍的谷歌就在这方面吃了很大的亏,在谷歌提交给美国交通安全部门的报告里,谷歌汽车一共发生了272起故障,大多数就是因为自己没有这些经验数据的积累,造成了类似传感器读错了数,转向刹车配合冲突之类的故障。
等到彻底的理清了一套车载网络之后,这个时候就可以搭建自动驾驶的硬件了。但是,这个硬件搭配,也有三种流派,对,智能汽车也是一片江湖,有流派很正常。
最硬气的流派,是奔驰领导的。1995年,奔驰在一辆S级轿车上安装了自动驾驶系统,然后完成了从慕尼黑到哥本哈根的实际道路测试,这也是最早完成的自动驾驶实验。奔驰的自动驾驶基本上是靠堆硬件的方法垒起来的。像现在奔驰S级上的自动驾驶,毫米波雷达加摄像头一起,一共有23个。这种系统的工作原理,我们在第一期讲博越自动刹车的时候详细说过,就是雷达看远点的地方,摄像头看车头前面。
现在最主流的的流派,是视频处理配合传感器的组合。奥迪和特斯拉,用的就是这种组合。简单的说,这种自动驾驶的硬件系统,就是一个摄像头,再搭配几个超声波传感器。
像咱们平时用的数码相机,它是把三维的世界转变成了二维平面。自动驾驶的摄像头,却是要把二维的画面再重新变换成三维,它分析图像特征确定画面中的车辆和行人,再用光学成像的原理算出这些车和人的距离。

这个组合还很便宜。像现在视频处理非常先进的以色列mobil eye公司,它的摄像头特斯拉和奥迪都在用,但是最便宜的价格只要1000美元左右。
不过这个组合的缺点也很明显,下雨下雪雾霾天的时候,就不灵了,因为摄像头它看不清楚。在标线不清楚的路上也不灵,像车道保持这些功能,在这个组合里是要看着路上的线走的。
价钱最贵的流派,就数谷歌当掌门的激光雷达和传感器组合了。谷歌汽车头顶上那个激光雷达看起来很炫,价钱也很炫,售价要人民币40万以上了。不过最近生产这个激光雷达的美国公司velodyne(念 va lou dai )放出口风,说在中国已经找到了代工厂,这样他们就不用再手工生产了,而且还有希望把激光雷达的价格降到500美元一套。

激光雷达的好处就大了,它是用64或者32条激光线扫描路面,然后接收回波。它的测量精度也是这三种流派里最高的。连最新的特斯拉Model X,也开始安装激光雷达上路测试了。
除了这三个最主要的流派,还有个比较邪门的流派,这就是开头我们提到的霍兹,他最新的自动驾驶系统,即装了velodyne的激光雷达,又装了mobileye的摄像头,而且他还彻底破解了本田的CAN总线,让自动驾驶系统完全接管了刹车油门方向盘。对于这种骨骼精奇的奇才,搁任何一个投资人眼里,这都是宝贝。

三个局域网的整合,三种硬件流派的选择,估计我这个说法,是对自动驾驶汽车最简单的介绍了吧。但是几乎所有的汽车厂商和科技巨头都参与到了这场汽车的改革之中。按照华尔街的说法,汽车行业的变革,已经走到了拐点,既有上万亿规模的市场,又有了像谷歌和特斯拉这样的旗手。
而且现在自动驾驶还在快速的更新换代。像现在各自为战的传感器,现在开始被中央处理器统一指挥。像汽车里运行的上千万行的固定代码,也开始被类似阿法狗的自我学习程序替代。我想我们是幸福的,我们很可能在几年后就能享受到无人驾驶,那就让我们等等吧,等着无人驾驶这个科幻的东西,真的走进我们的生活。
————————往期聊车————————
《乱用远光灯 除了害人也会害自己》
总是有些人不分场合的乱开远光灯,明明是路灯锃亮的大街上,那也要开着一对远光灯。可是,你知道你这一道远光灯从别人眼睛里扫过之后,他们的眼睛会失明多长时间吗?
而且,现在行车记录仪这么普及,一旦确定一起车祸的起因,就是因为乱用远光引起的,法律上也有了一个新的办法。那就是用民法来填补交通法的缺陷,开远光的人也要赔钱,而且是挖坑一样的赔。
那,汽车远近光系统的初衷是什么?远光灯的致盲时间又是多少?远光灯造成车祸的法律责任该怎么判罚?这期的美女聊车,褥子姐就和你聊聊这些。
《自动刹车是高科技 但安全还在我们手上》
吉利博越在20万以下车型中,第一个安装了紧急主动刹车系统和ACC自适应巡航系统。但是在不断发生的博越车祸中,这套系统似乎并没有起到人们想象中的安全保护作用。那,紧急自动刹车系统,到底是会给我们带来怎样的安全体验呢?它又是怎么保护我们的行车安全?
《撞车了,安全气囊并不是最安全的保护》
总有人说,安全气囊的数量代表着这个汽车的安全程度。但是,如果不系安全带的话,在车祸发生的一瞬间,安全气囊也许会对乘客造成更大的伤害。而且,即使是目前最豪华的汽车,在安全气囊的弹出机制上,也存在这不可避免的缺陷。所以说,撞车了,必须是弹出安全气囊才是最好的防护措施吗?
每周二、周五,到喜马拉雅和褥子一起聊聊汽车生活,褥子等着你哦

关注我们



{kind=link}
{kind=link}
{kind=link}
{kind=link}