

扫地不再动手 iRobot吸尘机器人体验
闭上眼,仅通过触摸脚下9厘米高度内物品进行感应,在这样的情况下走遍房间内每一个角落,这一系列动作对于会思考的人类来说似乎都有些困难。Roomba能够通过红外传感器以及触碰感应等方式将房间每一处平均清扫三遍以上,四种配合它行进的清扫方式确保了屋内每一寸地面的清洁。

螺旋式清扫

螺旋式打扫动态图(Gif图,如不能正常播放请点击图片查看)

沿边式打扫(Gif图,如不能正常播放请点击图片查看)
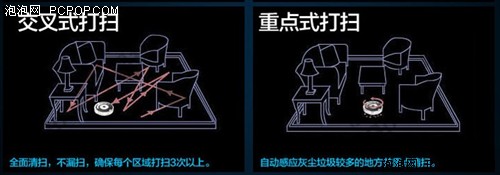
交叉式、重点式打扫
上一页介绍的清扫原理只是Roomba在打扫过程中它身下的动作,面对最大150平方米的清理能力,它依靠三条腿来完成房间内不停行走的清扫。Roomba采用后轮驱动,正前方的万向轮负责转向,柔软的“橡胶轮胎”可以防止它行进过程中划伤地板。


可调节高度以越障
2厘米高度越障测试,确保Roomba可以穿过椅子腿、地毯

Roomba的内置电池
为Roomba提供动力源的是3000mAh镍氢电池,12颗并联,电压14.4V。不同于锂电池,在Roomba的使用说明中多次提及首次充电应连续进行16小时,普通状态下Roomba的充电需要3个小时,充满后的续航时间为2小时。对于这个满身都需要电机来驱动的小机器人而言,这样的表现可以理解,2小时足以让它清理好房间并返回充电底座补充能量。Roomba机器人的高度只有9.2cm,底盘很低,所以在清洁时我们要让它避开积水区域以防止液体对电路部分带来危害。

充电底座

机身上也有适配器的接口

Roomba充电指示灯
自座测试——自动修正路线、进站减速、指示灯频闪
iRobot为Roomba设计了两种充电方式,即便我们手中定位最低的网络超值版C也提供了充电底座,通过机器人底部的两个金属触点与充电座金属触点的连接,Roomba在清理完房间或者电量较低时会自动返回充电站,两者通过顶部的红外传感器进行交流。在试用实际中,Roomba会自动修正行进路线并缓慢的接近金属触点。
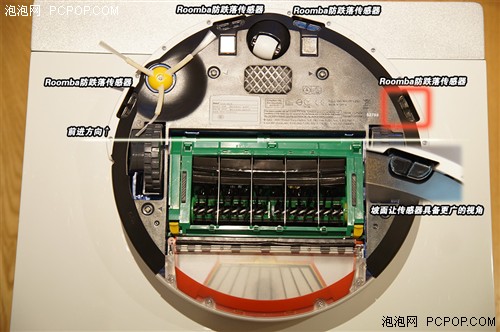
Roomba防跌落传感器
在室内行进时,可能还会遇到屋内存在插板电线、高低落差的台阶等环境,Roomba的防缠绕以及防跌落设计可以帮助这个小家伙摆脱潜在的危险。网络超值版等低配置Roomba吸尘机器人底部安装有4颗传感器,位于它前方的半圆形区域内,高阶版的传感器则是360°布局的,防跌落保护更加完善。
Roomba防缠绕测试
Roomba防跌落测试
红外传感器相当于Roomba的眼睛,它能够感知前方的障碍,但他并不清楚前方障碍是否为垂落的床单等可穿行区域,于是在视频里我们能够看到它把纸巾盒撞落的情形。遇到障碍时Roomba它会减速并轻轻撞击前方的屏蔽物,轻触可以防止对家内物品以及Roomba造成损伤,它以这种方式来最大限度的走遍整个房间进行清理。
为了防止如视频中这样对易碎物品造成损害,我们可以为Roomba选购虚拟灯塔墙,这个配件有两种工作模式。灯塔模式下它可以将房间划分区域,在灯塔一侧清理完成后进入下一区域进行清理。另外灯塔顶部的红外传感器还能在吸尘机器人以及充电底座中间进行引路,以减少远途清理后机器人返回底座的时间。

虚拟墙为Roomba限定工作范围
虚拟墙模式可以给Roomba下达“此区域禁止入内”的指令,以防止它进入浴室等潮湿环境,也可以用于保护某区域内的易碎物品。
离地时Roomba会自动停止工作
Roomba是个会说中文的机器人
当我们拎起Roomba或者它处于离地的状态时,这个小家伙将完全罢工保护,强大的感应能力让它可以察觉到自己是否处于正常的工作环境中,另外全中文的语音提示大大增强了Roomba与我们的交流度。
关注我们



{kind=link}
{kind=link}
{kind=link}
{kind=link}